The Brick Experiment channel experiments multiple designs for depth control.
Syringe + lego linear actuator
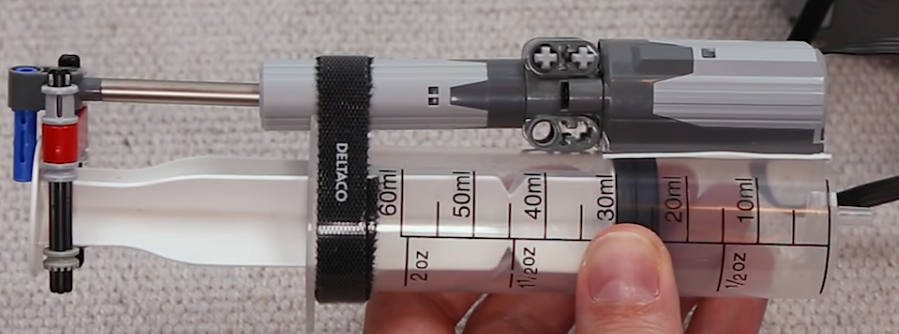
Pros:
- more energy efficient, as it sets the buoyant volume rather and let pressure do the job
Cons:
- seems brittle
- doesn't respect hull integrity
Home-made propellers
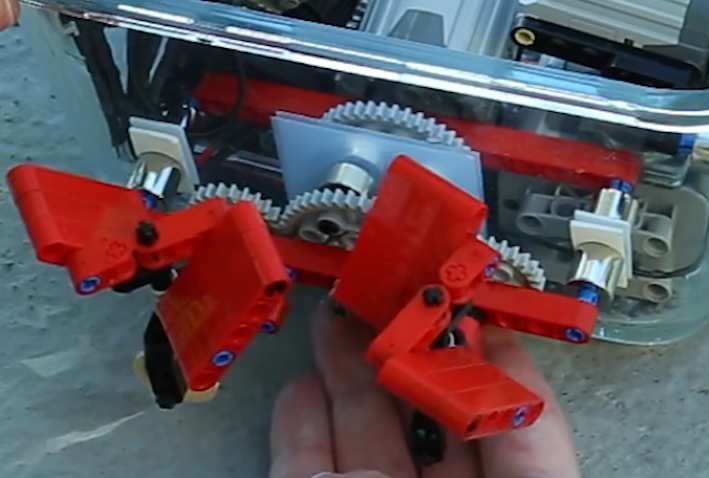
Pros:
- more reactive
- respects hull integrity
Cons:
needs constant adjustmentrequires precise weighting of the sub in order to make it perfectly buoyant-neutral- less energy efficient
- bad hydrodynamics
air ballon & lego air pump
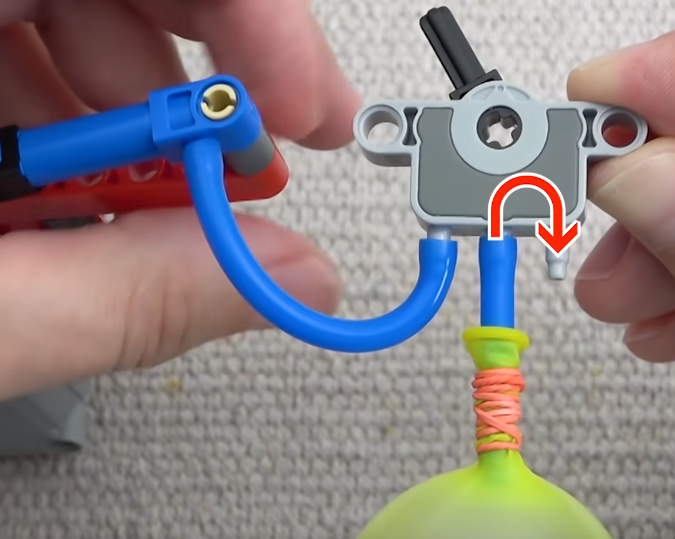
Pros:
- more energy efficient, as it sets the buoyant volume rather and let pressure do the job
- outside ballon leaves more room inside the hull
Cons:
- requires specific parts
- doesn't respect hull integrity
- seems harder to control
- rubber parts have a shorter lifespan and require to be replaced more often
- more likely to grab on whatever the shrimp rubs against in the water
- I'm not convinced by the outside air balloon overall look 😬
syringe + infinite screw + track
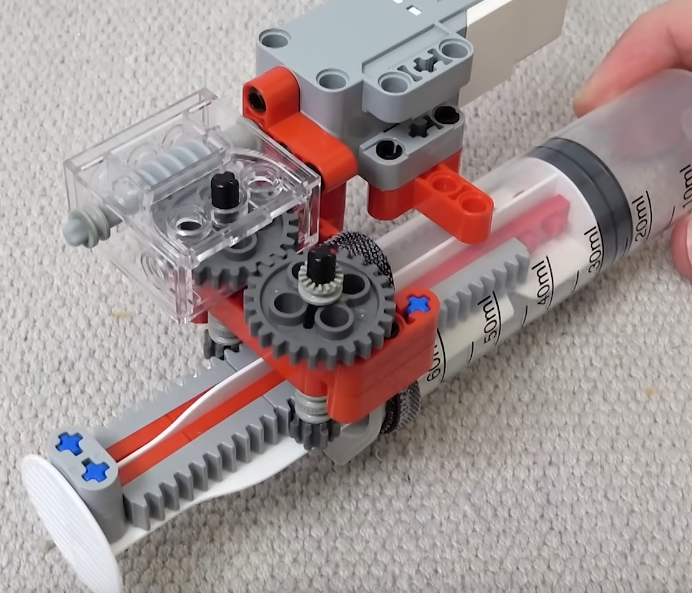
Pros:
- more energy efficient re leveraging pressure
- probably more robust than the first design with the pump
Cons:
- doesn't respect hull integrity
Summary
The last design is my favorite, given the energy efficiency and pretty much lack of flaw, once we get over the requirement to pierce a whole through the hull. Also, BrickExperimentChannel has detailed the construction steps in their blog. Might as well take advantage of it!
Possible improvement: If the motor is able to pull/push the syringe with a single gear & track, it should be possible to slightly stagger them off, one from the other, in order to leave each gear run off its track in its own direction, while the other gear would still be on its own and able to move the pump in the other direction. This would solve a possible issue related to hitting the min/max pump positions. Not sure if this is a relevant issue at this time.
Edit: I ended up solving this issue with software. Detailed there.